
We define the transfer function of a black box model as

where 




These 



Applying the Inverse Laplace transform we have an input:

These 
A positive real pole is a pole 



A negative real pole 


A zero pole 

A purely imaginary pole 

A genuinely complex pole 

While the 

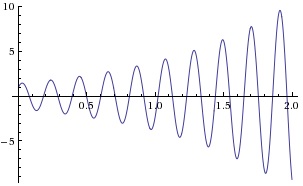
Note that this behaviour is unstable.
When we have complex pole 


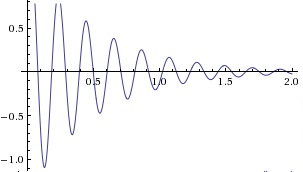
This is inherently stable behaviour.

Leave a comment
Comments feed for this article