
You are currently browsing the category archive for the ‘Grinds’ category.
The videos, here, comprise me going through a full Leaving Cert Higher Level Mathematics Paper, namely 2019, Paper 1.
They’re neither slick, perfect, nor as good as I would like them to be.
The videos are labelled in the descriptions, so if you are looking for, say, Q. 5 you can flick through the videos until you find the question you are looking for (e.g. Q. 5 starts at 17.05 here).
All students are looking for help: but perhaps the student that these videos are best placed to help is a student (eventually) going for a H1 who needs something to be explained in more depth, or to give the thought process behind attacking a more challenging problem.
When I say difficult, I mean difficult in comparison to the usual standard of Higher Level Leaving Cert Applied Maths Connected Particles Questions
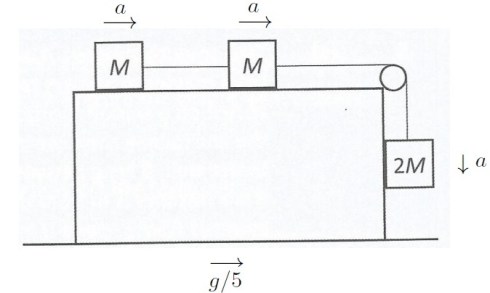
Question (a)
Consider the following:

A rectangular block moves across a stationary horizontal surface with acceleration 


There is a serious problem with this question and that is that the asymmetry in the problem means that there is an ambiguity: is the block moving left to right or right to left? I am going to assume the block moves from left to right. One would hope not to see such ambiguity in an official exam paper.
Two particles of mass 

(i)
If contact between the particles and the block is smooth, find the magnitude and direction of the resultant forces acting on the particles.
Solution
Note firstly that there are two accelerations at play. The acceleration of the block relative to the horizontal surface, 
We draw all the forces (I lazily didn’t add arrows to the force vectors):

We know that the normal forces for the particles on top of the block because their vertical acceleration is zero and so the sum of the forces in that direction must be zero, and as the down forces are equal for both, necessarily the up forces must be equal too.
The purpose of this post is to briefly discuss parallelism and perpendicularity of lines in both a geometric and algebraic setting.
Lines
What is a line? In Euclidean Geometry we usually don’t define a line and instead call it a primitive object (the properties of lines are then determined by the axioms which refer to them). If instead points and line segments – defined by pairs of points 
![[PQ]](https://s0.wp.com/latex.php?latex=%5BPQ%5D&bg=ffffff&fg=545454&s=0&c=20201002)
Geometric Definition Candidate
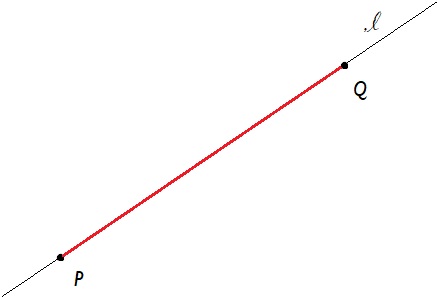
A line,
, is a set of points with the property that for each pair of points in the line,
,
.
In terms of a picture this just says that when you have a line, that if you take two points in the line (the language in comes from set theory), that the line segment is a subset of the line:
Exercise:
Why is this objectively not a good definition of a line.
Once we move into Cartesian\Coordinate Geometry we can perhaps do a similar trick. We can use line segments, and their lengths to define slope, (slope = rise over run) and then define a line as follows:
Algebraic Definition Candidate
A line,
, the slope is a constant.
This means that if you take two pairs of distinct points in a line 
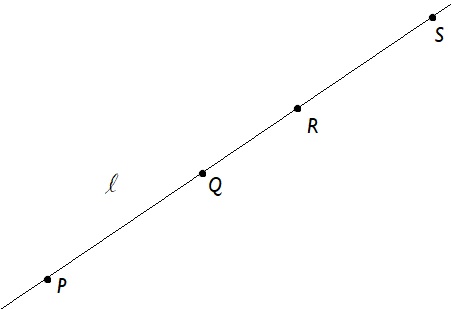
This definition, however, has exactly the same problem as the previous. The definition we use isn’t too important but I do want to use a definition that considers the line a set of points.
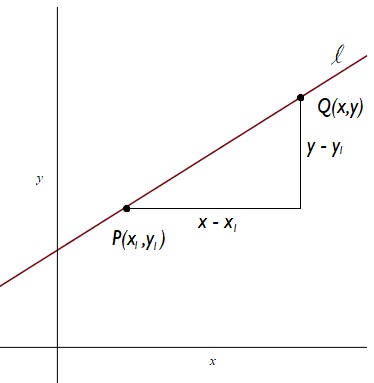
The Equation of a Line
We can use such a definition to derive the equation of a line ‘formula’ for a line of slope 
Suppose first of all that we have an 


Occasionally, it might be useful to do as the title here suggests.
Two examples that spring to mind include:
- solving
for
(relative velocity example with
below)
- maximising
without the use of calculus

Note first of all the similarity between:

This identity is in the Department of Education formula booklet.
The only problem is that 
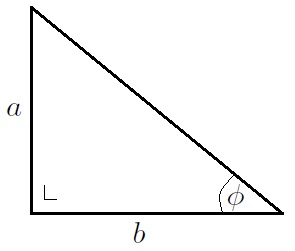
Using Pythagoras Theorem, the hypotenuse is 




Similarly, we have

where 
Consider the following problem:
Two masses of 5 kg and 1 kg hang from a smooth pulley at the ends of a light inextensible string. The system is released from rest. After 2 seconds, the 5 kg mass hits a horizontal table:
i. How much further will the 1 kg mass rise?
ii. The 1 kg mass then falls and the 5 kg mass is jolted off the table. With what speed will the 5 kg mass begin to rise?
[6D Q. 4. Fundamental Applied Maths, 2nd Edition, Oliver Murphy]
It isn’t difficult to answer part i.: the answer is 
However how to treat part ii.? First of all a picture to help us understand this problem:

The 1 kg mass has dropped under gravity through a distance of 
Taking the final position as 

When it reaches the point where the string is once again taut, it has not potential energy but the potential energy it had has been transferred into kinetic energy:

and this must equal the potential energy 

Now this is where things get trickier. My idea was to use conservation of momentum on the two particles separately. As this clever answer to this question shows, you can treat the 5 kg mass, string, and 1 kg mass as a single particle.
So the prior momentum is the mass of the 1 kg mass by 

The ‘after’ momentum is the mass of the 1 kg and 5 kg masses times the new velocity:

By Conservation of Momentum, these are equal:

This post follows on from this post where the following principle was presented:
Fundamental Principle of Solving ‘Easy’ Equations
Identify what is difficult or troublesome about the equation and get rid of it. As long as you do the same thing to both numbers (the “Lhs” and the “Rhs”), the equation will be replaced by a simpler equation with the same solution.
There are a number of subtleties here: basically sometimes you get extra ‘solutions’ (that are not solutions at all), and sometimes you can lose solutions.
Let us write the squaring function, e.g. 






check out O.K. note that

does not bring us back to where we started.
This problem can be fixed by restricting the allowable inputs to 


The other thing we look out for as much as possible is that we cannot divide by zero.
There are other issues around such as the fact that 


Often, in context, these subtleties are not problematic. For example, equations with no solutions rarely arise and quantities might be positive so that if we have 

Introduction
To successfully analyse and solve the equations of Leaving Cert Applied Maths projectiles, one must be very comfortable with trigonometry.
Projectile trigonometry all takes place in ![[0^\circ,90^\circ]](https://s0.wp.com/latex.php?latex=%5B0%5E%5Ccirc%2C90%5E%5Ccirc%5D&bg=ffffff&fg=545454&s=0&c=20201002)

Recalling that two triangles are similar if they have the same angles, the fundamental principle governing trigonometry might be put something like this:
Similar triangles differ only by a scale factor.
We show this below, but what this means is that the ratio of corresponding sides of similar triangles are the same, and if one of the angles is a right-angle, it means that if you have an angle, say 
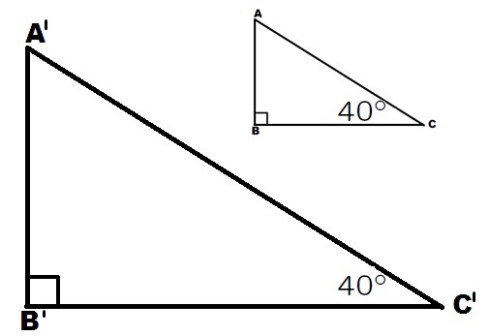
These are two similar triangles. The opposite/hypotenuse ratio is the same in both cases.
Suppose the dashed triangle is a 



which is the same as the corresponding ratio for the smaller triangle.
This allows us to define some special ratios, the so-called trigonometric ratios. If you are studying Leaving Cert Applied Maths you know what these are. You should also be aware of the inverse trigonometric functions. Also you should be able to, given the hypotenuse and angle, find comfortably the other two sides. We should also know that sine is maximised at
In projectiles we use another trigonometric ratio:

Note 

The Pythagoras Identity
For any angle
.
Quadratics are ubiquitous in mathematics. For the purposes of this piece a quadratic is a real-valued function 

where 

Geometry
The basic object we study is the square function, 
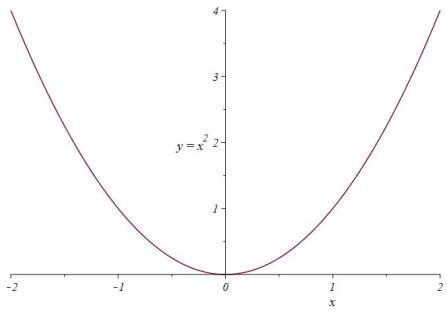
All quadratics look similar to 



The geometry dictates that quadratics can have either zero, one or two real roots. A root of a function is an input 




There are a number of ways of explaining why you cannot divide by zero. Here are my two favourites.
Any Set of Numbers Collapses to a Single Number
How old are you? Zero years old.
How tall are you? Zero metres old.
How many teeth do you have? Zero.
How many Superbowls has Tom Brady won? Zero
Yep, if you allow division by zero you only end up with one number to measure everything with.
As I said in the previous post, there is a duality:
Points on a Curve (Geometry) 
This means we can answer geometric questions using algebra and answer algebraic questions using geometry.
Problem
Consider the following two questions:
- Find the tangents to a circle
of a given slope.
- Find the tangents to a circle
Both can be answered using the duality principle.
Example
Find the tangents to the circle

that are
(a) parallel to the line
(b) through the point
[caution: the numbers here are disgusting]

Solution (a) i:
First of all a sketch (and the remark that a tangent is a line):
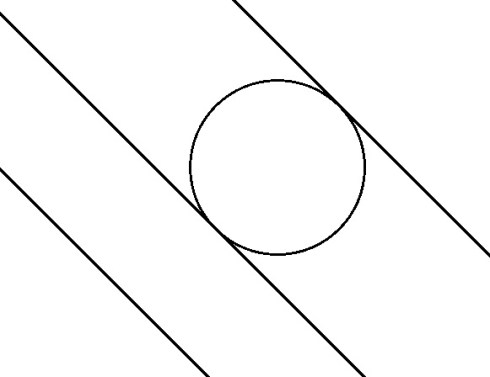
Here we see the circle 

Recent Comments